Pozrite si
Kým sa funkcie autopilotov testovali na skúšobných polygónoch, problém s orientáciou neexistoval. Ani v súčasnosti, keď už autonómne autá v celých flotilách brázdia cesty v mnohých štátoch, nie je s navigáciou vážnejší problém.
V neznámom teréne
Firmy však testujú autonómne autá vo veľkých mestách, alebo na hlavných cestách z dobrých dôvodov. Pre spoľahlivú orientáciu potrebujú autá s autopilotom kvalitné digitálne 3D mapy s identifikáciou jazdných pruhov a značiek. Tie však často chýbajú pre rôzne vidiecke cesty 2. a 3. triedy, o poľných cestách nehovoriac.

V takomto prostredí by mohlo zablúdiť aj autonómne auto, napriek satelitnej navigácii. Ak by si to, samozrejme, nenamierilo do cieľa krížom cez pole, čo v niektorých prípadoch nie je zlé riešenie, ak hovoríme o SUV.
Vedci z Computer Science and Artificial Intelligence Laboratory (CSAIL) pri MIT však vyvinuli riešenie tohto problému. V spolupráci s automobilkou Toyota vyvinuli nový systém nazvaný MapLite, ktorý dokáže nájsť cestu aj bez 3D máp.
Ako to funguje?
Systém získava základné informácie o polohe vozidla pomocou GPS a používa ich tak pre konečný cieľ jazdy, ako aj pre „miestny“ cieľ z pohľadu vozidla. MapLite kombinuje jednoduché dáta z GPS s radom senzorov, ktoré sledujú podmienky na cestách.
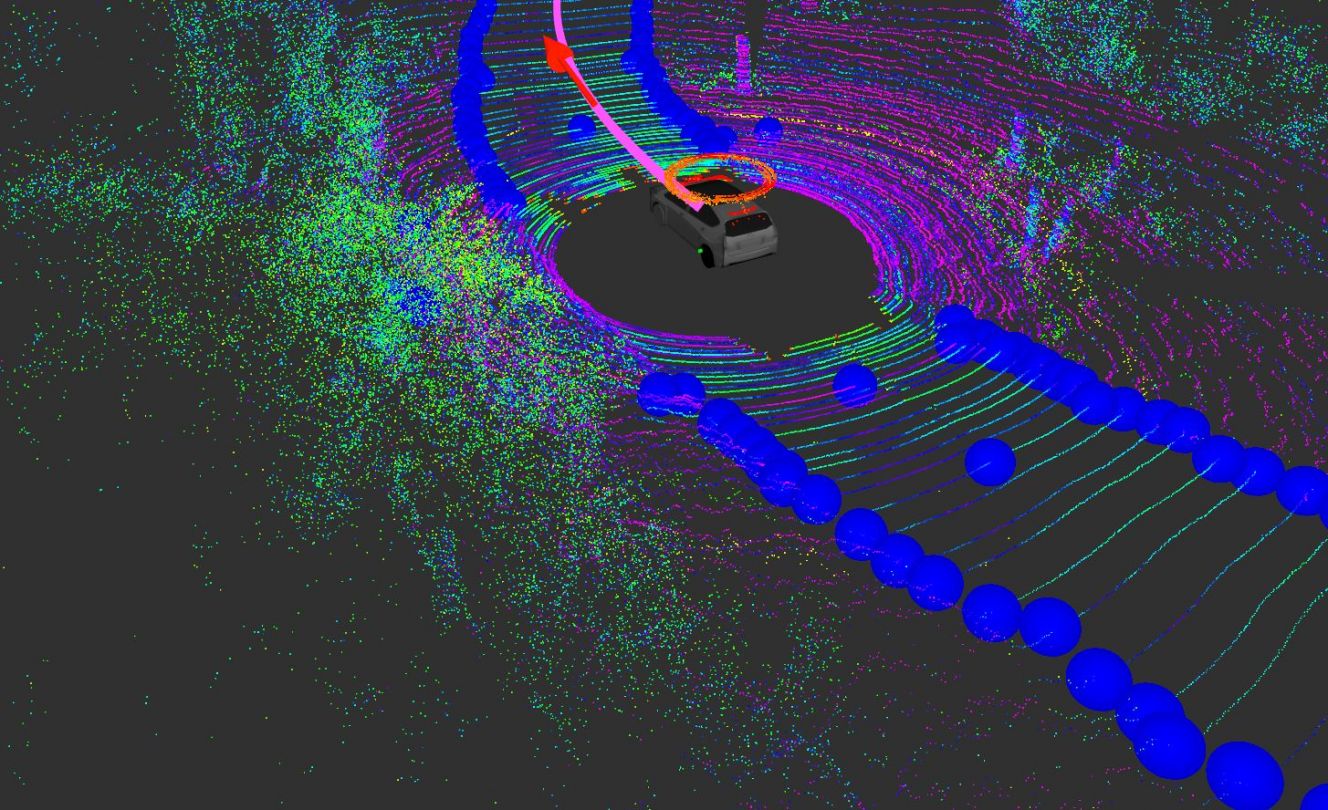
Stroj potom používa svoje palubné senzory na vytýčenie trasy k miestnym orientačným bodom a pomocou LiDAR-u sa snaží monitorovať krajnicu cesty, ktorá je obvykle podstatne viac plochá ako okolitá krajina.
Spoločne tieto prvky umožnili vývojárom autonómne jazdiť po viacerých vidieckych cestách v meste Devens v Massachusetts a spoľahlivo identifikovať cestu viac ako 30 metrov dopredu.
V rámci spolupráce s Toyota Research Institute pri testoch použili Toyotu Prius, vybavenú radom senzorov LiDAR a IMU.
Vo všeobecnosti dávajú modely založené na parametroch autopilotovi schopnosť rozhodnúť sa na križovatke, alebo na konkrétnej ceste, ktorým smerom sa vydať.
Pokiaľ ide o pokrok pri vývoji autonómnych áut, ich navigačné schopnosti sú stále mizerné v porovnaní s človekom. Existujúce systémy sa v podstate naplno spoliehajú na 3D mapy a senzory a algoritmy na rozpoznávanie obrazu využívajú len na to, aby sa vyhli dynamickým objektom, ako sú chodci a iné automobily.

K takémuto stavu môžeme na základe degeneratívneho technického „rozvoja“ dospieť aj my, keď sa už budeme na navigácie spoliehať natoľko, že bez nich budeme stratení. Spomeňme len, čo s naším mozgom urobili kalkulačky a telefónne zoznamy v mobiloch. Ľudia, čo nevedia spamäti ani svoje vlastné telefónne číslo, nie sú raritou.
Autopilot s orientačným zmyslom
MapLite na rozdiel od toho používa senzory pre všetky aspekty navigácie a na údaje GPS sa spolieha len pri získaní hrubého odhadu polohy vozidla. Systém najprv definuje cieľ cesty a tzv. „miestne navigačné ciele“, ktoré musia byť v dohľade z vozidla.
Jeho senzory potom určia trasu, aby sa dostali k tomu bodu pomocou LiDAR-u, ktorý odhaduje polohu krajníc cesty. MapLite na to nepotrebuje fyzické značky na cestách, lebo vychádza z podmienky, že cesta je viac plochá, ako okolitý terén.
Tím vývojárov vyvinul systém modelov, ktoré sú „parametrizované“ tak, že opisujú súbor situácií, ktoré sú určitým spôsobom podobné. MapLite sa líši od iných spôsobov jazdy bez máp spoliehajúcich sa skôr na strojové učenie tak, že trénujú údaje z jedného súboru ciest a potom ich testujú na iných.
„Predstavujeme si, že autá v budúcnosti budú v mestských oblastiach vždy používať 3D mapy,“ hovorí šéf výskumného tímu Teddy Ort. „Ale v prípade, že sa budú musieť vydať mimo značených ciest, tieto vozidlá budú musieť byť rovnako schopné ako ľudia pri jazde na neznámych cestách. Dúfame, že naša práca bude významným krokom týmto smerom,“ dodal Ort.
Zatiaľ má MapLite stále určité obmedzenia. Nie je napríklad dosť spoľahlivý pre horské cesty, pretože nezvláda správne vyhodnotiť dramatické zmeny vo výške. Vedci však veria, že v ďalšom kroku rozšíria paletu typov ciest, ktoré autonómne vozidlo dokáže zvládnuť.
V konečnej fáze by mal nový systém dosiahnuť porovnateľnú úroveň spoľahlivosti, ako systémy využívajúce mapy, ale s omnoho širším záberom.
Zdroj